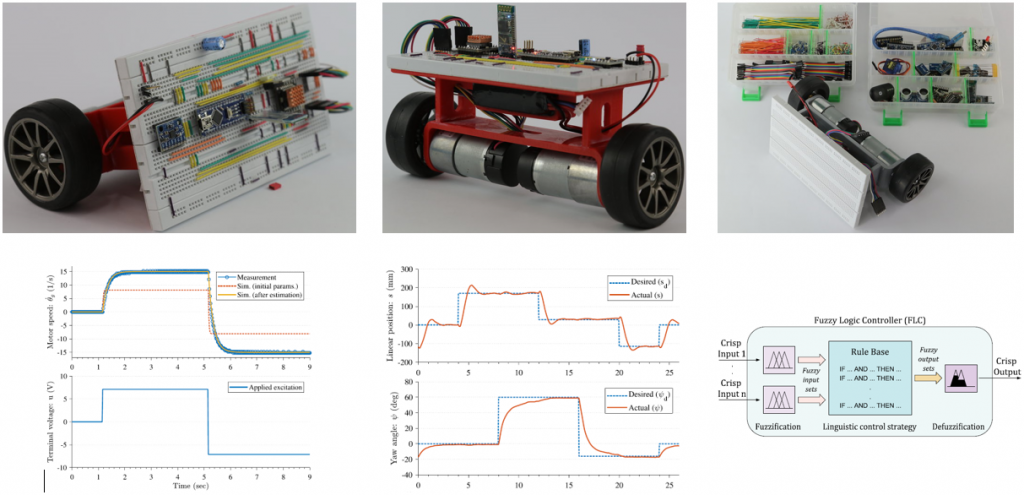
The work presents a novel control laboratory project that provides hands‐on experience in feedback control concepts (embedded control systems) through dedicated assignments, with a particular focus on the design and implementation of fuzzy control. The project is structured around an inexpensive, portable self‐balancing robot (SBR), whose embedded system is realized using commercially available breakout boards as the first assignment. For the stabilization of the plant, students are guided to execute the essential stages of control system design, from system modeling and parameter optimization, over basic or advanced control strategy design in the MATLAB/Simulink environment, to both implementation and validation of the closed loop on the real robot. To demonstrate and foster the application of fuzzy logic, the second part of the paper introduces a simple control strategy based on fuzzy logic controllers. Then, a lookup table‐based implementation technique is described for the demonstration of manual interfacing and embedded coding of fuzzy control strategies. The proposed methods are clear and straightforward; they highly foster the understanding of feedback control techniques and allow students to gain vast knowledge in the practical implementations of control systems.
Publications:
Odry Á, Fullér R, Rudas IJ, Odry P. Fuzzy control of self‐balancing robots: A control laboratory project. Comput Appl Eng Educ. 2020;1–24. https://doi.org/10.1002/cae.22219
Supplementary material:
https://github.com/akosodry/self-balancing-robot-kit